Measurement Techniques for Industrial Motion Control
by Nicola O'Byrne,senior applications engineer, Analog Devices, Inc.
Industrial motion control covers a breadth of applications, ranging from inverter-based fan or pump control, to
factory automation with more complex ac drive control, to advanced automation applications such as robotics with
sophisticated servo control. These systems require sensing and feedback of a number of variables, such as motor
winding current or voltage, de link current or voltage, rotor position, and speed. The selection of variables and
the required measurement precision depends on the end application demands, the system architecture, target system
cost, or system
complexity, amongst other considerations such as value add features like condition monitoring. With motors
reportedly consuming 40% of worldwide energy, international regulations have increased the focus on system
efficiency across the entire range of industrial motion applications, increasing the importance of these variables,
especially current and voltage.
This article focuses on current and voltage sensing in various motor control signal chain topologies according to
motor power rating, system performance requirements, and end application. In this context, motor control signal
chain implementations differ by sensor choice, galvanic isolation requirements, analog-to-digital converter (ADC)
choice, system integration, and system power and ground partitioning.
Figure 1: Industrial Drive Application Spectrum
Industrial Drive Application Spectrum
Motor control applications can range from simple inverters to complex servo drives, but all include motor control
systems with a power stage, a processor that drives a pulse-width modulator (PWM) block with differing levels of
sensing and feedback. A simplified view of the application spectrum is shown in Figure 1, illustrating systems with
increasing complexity as one moves from left to right across this spectrum, from simple control systems like pumps,
fans, and compressors that can be implemented without precision feedback and just use a simple microprocessor. As
system complexity increases, moving toward the higher end of the spectrum, complex control systems require precision
feedback and fast communications interfaces. Examples of these would be sensored or sensorless vector control of
induction motors or permanent magnet motors, and high power industrial drives designed for efficiency-shown in
Figure 1 as large pumps, fans, and compressors. At the highest end of the spectrum, complex servo drives are used in
applications such as robotics, machine tools, and pick and place machines. Sensing and feedback of variables becomes
more critical as the system becomes more complex.
Drive Architectures-System Partitioning
There are many challenges associated with designing systems to address the variety of applications within the
industrial motion control space. A generic motor control signal chain is shown in Figure 2.
Figure 2: Generic Motor Control Signal Chain
Of critical concern are isolation requirements, and these usually have significant influence on the resulting
circuit topology and architecture. There are two key factors to
consider: why to isolate and where to isolate.
The classification of isolation required will be dictated by the former. The requirement may be high voltage safety
isolation (SELV) to protect against human shock, or functional isolation to level shift between nonlethal voltages,
or isolation for data integrity and noise mitigation purposes. Where to isolate is often determined by the expected
system performance. Motor control is generally a harsh, electrically noisy environment, with designs commonly
experiencing large common mode voltages of several hundred volts, potentially switching at more than 20 kHz with
very high transient dv/dt rise times. For this reason, both higher performance systems and high power inherently
noisier systems will usually be designed with the power stage isolated from the control stage. Whether the design
has a single or a dual processor approach can also have an influence on where to isolate. In systems that are both
lower performance and low power, it is common to isolate at the digital communication interface meaning the power
and control stages are on the same potential. Lower end systems have lower bandwidth communications interfaces to
isolate. Traditionally, it has been challenging to isolate the communications interface in high end systems due to
the high bandwidths required and limitations of traditional isolation technologies, but this is changing with the
advent of magnetically isolated CAN and RS-485 transceiver products such as those from Analog Devices available at
www.analog.com/icoupler.
Two critical elements in high performance closed-loop motor control designs are the PWM modulator outputs and the
motor phase current feedback. Figure 3a and 3b illustrate where the safety isolation is required depending on
whether the control stage shares the same potential as the power stage, or is referenced to earth ground. In either
case, the high-side gate driver and the current sense node need to be isolated, bu the class of isolation is
differenet-in Figure 3a, only functional isolation of these nodes is necessary, while in Figure 3b, human safety
(that is, galvanic) isolation of these nodes is critical.
Measurement Techniques and Topologies for Current and Voltage Sensing
Signal chain implementations to sense current and voltage differ by sensor choice, galvanic isolation requirements,
ADC choice, and system integration in addition to system power and ground partitioning as already outlined. Signal
conditioning to realize a high fidelity measurement is not trivial. For example, recovering small signals or
transmitting digital signals within such a noisy environment is challenging, while isolating an analog signal is an
even bigger challenge. In many cases, signal isolation circuits introduce phase delays that limit system dynamic
performance. Phase current sensing is particularly challenging, as this node is connected to the same circuit node
as the gate driver output within the heart of the power stage (inverter block) and therefore experiences the same
demands in terms of isolation voltages and switching transients. Determining the measurement signal chain
(technique, signal conditioning, and ADC) to be implemented within a motor control system relies on three key
factors:
- The point or node in the system, as this determines what needs to be measured.
- The power level of the motor and resulting sensor choice-one that is inherently isolated or not. The sensor
choice has significant influence over the ADC choice, including the converter architecture, functionality, and
anlog input range.
- The end application. This can drive the need for high resolution, accuracy, or speed within the sensing signal
chain. Implementing sensorless control over a wide speed range, for example, demands more measurements taken more
often and of higher accuracy. The end application also impacts the demand on the ADC functionality. For example, a
higher channel count ADC may be required for multiaxis control.
Current and Voltage Sensors
The most commonly used current sensors in motor ocntrol are shunt resistors, Hall effect (HE) sensors, and current
transformers (CT). While shunt resistors don't provide isolation and incur losses at higher currents, they are the
most linear of all sensors, the lowest cost, and suitable for both ac and dc measurements. The signal level
reductions needed to limit shunt power losses typically limit shunt applications to 50 A or less. CTs and HE sensors
provide inherent isolation, allowing them to serve high current systems, but they are higher cost and result in a
less accurate solution than that which can be achieved through shunt resistor usage, either due to the sensor itself
having poorer initial accuracy or worse accuracy over temperature.
Motor Current Measurement Locations and Topologies
Quite apart from the sensor type, there are several motor current measurement nodes to choose from. The average de
link current can be used for control purposes, but motor winding current is used as the primary feedback variable in
more advanced drives. Direct in phase winding current measurement is the ideal and used in high performance systems.
However, the winding current can be measured indirectly using a shunt in each of the lower inverter legs or with a
single shunt in the de link. The advantage of these approaches is that the shunt signals are all referenced to the
power common, but extraction of winding current from the de link requires the sampling to be synchronized to the PWM
switching. Direct in phase winding current measurements can be taken with any of the above current sensing
techniques, but the shunt resistor signals must be isolated. A high common-mode amplifier can provide functional
isolation but human safety isolation must be provided by an isolated amplifier or isolated modulator.
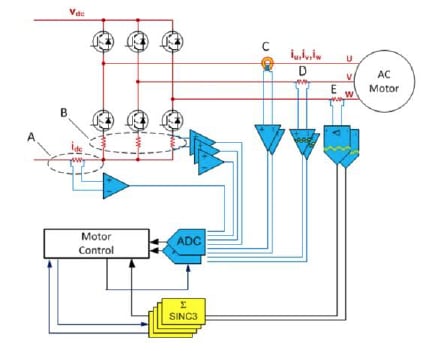
Figure 4: Isolated and Nonisolated Motor Current Feedback
Figure 4 illustrates the various current feedback options described above. While only one of these options is
required for control feedback, the de link current signal may be used as a backup signal for protection.
As already described, the system power and ground partitioning will determine what classification of isolation is
required and therefore which feedback options are suitable. The system target performance will also influence the
sensor choice or measurement technique. There are many configurations which may be reqlized spanning the performance
spectrum.
Lower Performance Example: Power Stage and Control Stage on Common Potential, Sensing Option A or B
Using leg shunts is one of the most economical techniques to measure motor current. In this example, where the
power stage shares the same potential as the control stage, there is no common mode to be dealt with and the outputs
from option A or B can connect directly to the signal conditioning circuitry and ADC. This type of topology would
generally be found in a low power and low performance system with the ADC embedded in the microprocessor.
Higher Perfrormance Example: Control Stage Connected to Earth, Sensing Option C, D, or E
In this example, human safety isolation is required. Sensing options C, D, and E are all possible. Option E
provides the highest quality current feedback of all three options and, being a higher performance system, it is
likely that there is an FPGA or other form of processing in the system that can provide the digital filter for the
isolated modulator signal. The ADC choice for option C, the isolated sensor (likely closed loop HE), would
traditionally be discrete to achieve higher performance than that possible with embedded ADC offerings to date.
Option D is an isolated amplifier in this configuration, vs. a common-mode amplifier, as safety isolation is
required . An isolated amplifier will limit performance, and so an embedded ADC solution may suffice. This will
provide the lowest fidelity current feedback compared to options C or E, and while an embedded ADC may be perceived
as "free" and the isolated amplifier potentially "cheap," the implementation usually requires additional components
for offset compensation and level shifting for ADC input range matching, increasing the overall signal chain cost.
There are many topologies that can be used in motor control design to sense motor current with many factors to
consider such as cost, power level, and performance level. A key objective for most system designers is to improve
the current sense feedback in order to improve efficiency within their cost targets. For higher end applications,
current feedback is critical to other system performance measures such as dynamic response, acoustic noise, or
torque ripple, not just efficiency. It is evident that there is a continuum of performance running from low to high
across the various topologies available and this is coarsely mapped out in Figure 5 illustrating both lower power
and higher power options.
Figure 5: Current Sensing Topologies Performance Spectrum
Motor Control System Designer Objectives, Needs, and Resulting Trends: Migration from the Sensors to Shunt
Resistors
Shunt resistors coupled with isolated L-Ll modulators provide the highest quality current feedback where the
current level is low enough for shunt usage. There is a significant trend for system designers to migrate from HE
sensors to shunt resistors, with an additional trend to move to the isolated modulator approach vs. an isolated
amplifier approach. The sensor change alone results in a lower bill of materials (BOM) and PCB insertion costs and
improved sensor accuracy. The shunt resistor is not sensitive to magnetic fields or mechanical vibration. Quite
often, system designers replacing HE sensors with shunt resistors may opt for an isolated amplifier and continue
using the ADC previously used in the HE sensor based design to limit the level of change in the signal chain.
However, as already noted, the performance will be limited by that of the isolated amplifier regardless of the ADC
performance.
Further replacing the isolated amplifier and ADC with an isolated L-Ll modulator will eliminate the performance
bottleneck and greatly improve the design typically taking it from a 9 to 10-bit quality feedback to a 12-bit level.
Analog over current protection (OCP) circuitry can also potentially be eliminated, as the digital filter required to
process the L-Ll modulator output can also be configured to implement a fast OCP loop. Therefore, any BOM analysis
should include not only the isolated amplifier, the original ADC, and the signal conditioning between these, but
also OCP devices that may be eliminated. The AD7401A isolated L-Ll modulator, based on Analog Devices iCoupler•
technology, has been an ideal product choice in the uptake of this trend with a differential input range of
±250 mV (±320 mV full scale commonly used for OCP), ideally suited to resistive shunt measurements.
The analog input is continuously sampled by the analog modulator and the input information is contained in the
digital output stream as a density of ones with a data rate up to 20 MHz. The original information can be
reconstructed with an appropriate digital filter, commonly a Sinc3 filter for precision current measurements. As
conversion performance can be traded off vs. bandwidth, or filter group delay, a coarser, faster filter can provide
fast response OCP in the order of 2 μs, ideally suited to IGBT protection.
Demand to Reduce Shunt Resistor Sizes
From a signal measurement aspect there are some key challenges associated with the shunt resistor selection as
there is a trade-off between sensitivity and power dissipation. A large resistor value will ensure the full range,
or as much as possible of the analog input range, of the L-Ll modulator will be used, thus maximizing dynamic range.
However, a large resistor value also results in a voltage drop and a reduction in the efficiency due to the I2 x R
loss of the resistor. Nonlinearity through self heating effects can also be a challenge using larger resistors. As a
result, system designers are faced with making trade-offs and further exacerbating this is a common need to select a
shunt size that will service many models and motors at different current levels. Maintaining dynamic range is also
challenging in the face of peak currents that can be several times the rated current of the motor and the need to
reliably capture both. The ability to control peak currents at system turn on varies greatly depending on the
design, varying from tight control of, say, 30% above nominal, to as much as a factor of 10 times the nominal
current. Peak currents also result from acceleration and load or torque change. However, in general it is common to
see the peak current in a system to be in the region of 4 times the nominal current in drive designs.
In the face of these challenges, system designers are looking for superior L-Ll modulators with wider dynamic
range, or improved signal to noise and distortion ratio (SINAD).
Isolated L-Ll modulator offerings to date have provided 16-bit resolution with up to 12-bit effective number of bits
(ENOB) guaranteed performance.
Following the shift to shunt resistor usage in lower power drives, motor drive manufacturers are also looking to
increase the power rating of drives that can make use of this topology both for performance and cost reasons. This
is only possible though the use of much smaller shunt resistors, which requires the advent of a much higher
performance modulator core to resolve the diminished signal amplitude.
System designers, particularly servo designers, are also constantly looking to improve system response through
reduced analog to digital conversion time, or reduced group delay through the digital filter associated with the
isolated L-Ll modulator and shunt resistor topology. As already noted, conversion performance can be traded off vs.
bandwidth, or filter group delay. A coarser, faster filter can provide a faster response, but at the expense of
performance. System designers analyze the effects of filter length or decimation ratio and then make trade offs
according to their end application needs. Increasing the clock rate of the modulator helps, but many designers are
already operating at the maximum clock rate of 20 MHz that the AD7401A accepts. One of the drawbacks with increasing
the clock rate is potential radiation and interference (EMI) effects. A higher performance modulator at the same
clock rate would improve the group delay vs. performance trade off, allowing faster response time with less impact
on performance.
Industry's Highest Performance Isolated I-4 Modulator
It is evident that a higher performance isolated L-t. modulator would support several needs and trends within
industrial motor control designs and improve the power efficiency of motor drives through shunt resistor size
reduction; improved sensorless control schemes; enabling the control of high efficiency interior permanent magnet
motors (IPM). The AD7403 from Analog Devices is the next generation product to the AD7401A, providing much wider
dynamic range at the same external clock rate of 20 MHz. This allows more flexible shunt size selection, optimizing
drive to motor matching, improving nominal and peak current measurement, reducing the impact of a single shunt size
for a range of motor models, and allowing for shunt resistor usage in place of HE sensors at higher current levels.
Dynamic response can also be improved through reduced measurement latency. The AD7403 also features an isolation
scheme with a higher continuous working voltage (V10RM) than the previous generation AD7400A and AD7401A, which can
also contribute to higher system efficiency through the use of higher de bus voltages and thus lower motor currents.
Broader System Solution Including The ADSP-CM40x Mixed Signal Control Processor
As already noted, the implementation of a L-t. modulator requires a digital filter in the system. This is
traditionally implemented with an FPGA or digital ASIC. The advent of the ADSP-CM408F mixed-signal control
processor, which includes hardware Sinc3 filters to which the AD?40x series of isolated L-t. modulators can directly
connect, is likely to lead to an increased rate of adoption of the resistive shunt current sensing technique coupled
with isolated L-t. modulators. As outlined, this technique was traditionally considered expensive as a result of
greater system complexity in the digital domain and associated (FPGA) cost. The ADSP-CM408F is a cost effective
solution and should enable many designers to consider resistive shunt current sensing who were previously
constrained by their cost targets.

















